 |
|
Estructuras de datos | |
| struct | PdsIir |
| Una estructura tipo PdsIir . Más... | |
Funciones | |
| PdsIir * | pds_iir_new (const PdsVector *hnum, const PdsVector *hden) |
| Crea un filtro IIR con parametros hnum y hden. Más... | |
| int | pds_iir_evaluate_value (PdsIir *IIR, PdsDfReal x, PdsDfReal *y) |
| Evalua el filtro IIR con el valor de entrada x, el resultado es cargado en y. Más... | |
| int | pds_iir_evaluate_vector (PdsIir *IIR, const PdsVector *x, PdsVector *y) |
| Evalua el filtro IIR con el vector de entrada x, el resultado es cargado en el vector y. Más... | |
| void | pds_iir_free (PdsIir *IIR) |
| Libera el filtro de tipo PdsIir. Más... | |
| void | pds_iir_destroy (PdsIir **IIR) |
| Libera el filtro de tipo PdsIir. y carga la variable con NULL. Más... | |
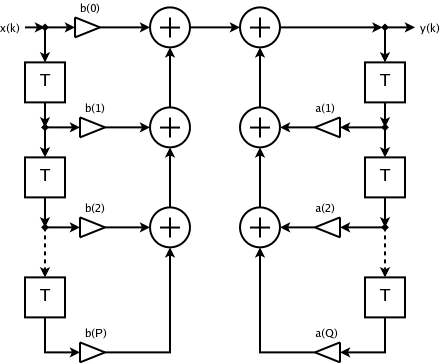
![\[ y[n]=\sum_{i=0}^{P}b_ix[n-i]+\sum_{i=1}^{Q}a_iy[n-i] \]](form_28.png)
.
![\[ \frac{Y[z]}{X[z]}=H[z]=\frac{\sum_{i=0}^{P}b_iz^{-i}}{1-\sum_{i=1}^{Q}a_iz^{-i}} \]](form_29.png)
.
![\[ a[0]=-1\]](form_30.png)
![\[ 0=\sum_{i=0}^{P}b_ix[n-i]+\sum_{i=0}^{Q}a_iy[n-i] \]](form_31.png)
.
![\[ \frac{Y[z]}{X[z]}=H[z]=\frac{\sum_{i=0}^{P}h_{num}[i]z^{-i}}{\sum_{i=0}^{Q}h_{den}[i]z^{-i}} \]](form_32.png)
.
| PdsIir * pds_iir_new | ( | const PdsVector * | hnum, |
| const PdsVector * | hden | ||
| ) |
Crea un filtro IIR con parametros hnum y hden.
. Los vectores hnum y hdem entregados como parametros de esta función nunca son modificados.
| [in] | hnum | Vector para los coeficientes de numerador del filtro. |
| [in] | hden | Vector para los coeficientes de denominador del filtro. |
Evalua el filtro IIR con el valor de entrada x, el resultado es cargado en y.
| [in,out] | IIR | El filtro IIR a usar. |
| [in] | x | El valor de entrada del filtro. |
| [out] | y | El valor de salida del filtro. |
| int pds_iir_evaluate_vector | ( | PdsIir * | IIR, |
| const PdsVector * | x, | ||
| PdsVector * | y | ||
| ) |
Evalua el filtro IIR con el vector de entrada x, el resultado es cargado en el vector y.
| [in,out] | IIR | El filtro IIR a usar. |
| [in] | x | El vector de entrada del filtro. |
| [out] | y | El vector de salida del filtro. |
| void pds_iir_free | ( | PdsIir * | IIR | ) |
Libera el filtro de tipo PdsIir.
| [in] | IIR | El filtro a liberar. |







 1.8.11
1.8.11

