 |
|
Estructuras de datos | |
| struct | PdsFir |
| Una estructura tipo PdsFir . Más... | |
Funciones | |
| PdsFir * | pds_fir_new (const PdsVector *h) |
| Crea un filtro FIR con parámetros h. Más... | |
| PdsFir * | pds_fir_get_new_lowpass (PdsDfNatural Order, PdsDfReal Wn, const PdsVector *Window) |
| Crea un filtro FIR pasa bajo, con un orden y frecuencia de corte especificado. Más... | |
| PdsFir * | pds_fir_get_new_highpass (PdsDfNatural Order, PdsDfReal Wn, const PdsVector *Window) |
| Crea un filtro FIR pasa alto, con un orden y frecuencia de corte especificado. Más... | |
| PdsFir * | pds_fir_get_new_bandpass (PdsDfNatural Order, PdsDfReal Wn1, PdsDfReal Wn2, const PdsVector *Window) |
| Crea un filtro FIR pasa banda, con un orden y frecuencias de corte especificados. Más... | |
| PdsFir * | pds_fir_get_new_bandstop (PdsDfNatural Order, PdsDfReal Wn1, PdsDfReal Wn2, const PdsVector *Window) |
| Crea un filtro FIR rechaza banda, con un orden y frecuencias de corte especificados. Más... | |
| int | pds_fir_evaluate_value (PdsFir *FIR, PdsDfReal x, PdsDfReal *y) |
| Evalúa el filtro FIR con el valor de entrada x, el resultado es cargado en y. Más... | |
| int | pds_fir_evaluate_vector (PdsFir *FIR, const PdsVector *x, PdsVector *y) |
| Evalúa el filtro FIR con el vector de entrada x, el resultado es cargado en el vector y. Más... | |
| int | pds_fir_get_x_value (PdsFir *FIR, PdsDfNatural i, PdsDfReal *x) |
| Esta funcion retorna el valor de X[n-i]. Más... | |
| int | pds_fir_get_h_value (PdsFir *FIR, PdsDfNatural i, PdsDfReal *h) |
| Esta funcion retorna el valor de h[i]. Más... | |
| const PdsVector * | pds_fir_get_h_vector (PdsFir *FIR) |
| Esta funcion retorna la dirección del vector h con los valores del filtro fir. Más... | |
| int | pds_fir_get_order (PdsFir *FIR) |
| Esta función retorna o grado del filtro FIR. Más... | |
| int | pds_fir_get_length (PdsFir *FIR) |
| Esta función retorna la longitud del vector que representa el filtro FIR. Más... | |
| int | pds_fir_frequency_response (const PdsFir *FIR, PdsVector *H) |
| Encuentra el módulo de la respuesta en frecuencia, normalizada de 0 a pi del filtro digital conformado por la respuesta al impulso h. Más... | |
| void | pds_fir_free (PdsFir *FIR) |
| Libera el filtro de tipo PdsFir. Más... | |
| void | pds_fir_destroy (PdsFir **FIR) |
| Libera el filtro de tipo PdsFir. y carga la variable con NULL. Más... | |
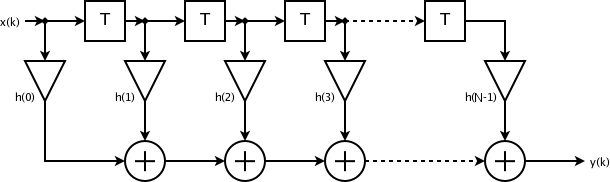
![\[ y[n]=\sum_{i=0}^{N-1}h_ix[n-i] \]](form_17.png)
.
![\[ \frac{Y[z]}{X[z]} = H[z] = \sum_{i=0}^{N-1}h_iz^{-i} \]](form_18.png)
.
| PdsFir * pds_fir_new | ( | const PdsVector * | h | ) |
Crea un filtro FIR con parámetros h.
El vector h entregado como parámetro a esta función nunca es modificado.
| [in] | h | Vector para los coeficientes de h_i*x[n-i]. |
| PdsFir * pds_fir_get_new_lowpass | ( | PdsDfNatural | Order, |
| PdsDfReal | Wn, | ||
| const PdsVector * | Window | ||
| ) |
Crea un filtro FIR pasa bajo, con un orden y frecuencia de corte especificado.
Puede ser usado un vector de ponderación (Window) para mejorar el comportamiento del filtro. Esta función crea un filtro de tipo I : http://www.mathworks.com/help/signal/ug/fir-filter-design.html Para elegir el orden minimo del filtro puede elegirse el criterio :
![\[ Order \geq \frac{4}{BW} \]](form_19.png)
where
![\[ BW=|Wn-round(Wn)| \]](form_20.png)
Este criterio es similar a http://www.dspguide.com/ch16/2.htm
| [in] | Order | El orden del filtro pasa bajo. |
| [in] | Wn | La frecuencia de corte normalizada del filtro pasa bajo. Wn significa que la frecuencia de corte es Wn*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Window | Es un vector de ponderación para mejorar el comportamiento del filtro. Si este valor es igual a NULL entonces es usado una ventana de hamming como vector de ponderación. |
| PdsFir * pds_fir_get_new_highpass | ( | PdsDfNatural | Order, |
| PdsDfReal | Wn, | ||
| const PdsVector * | Window | ||
| ) |
Crea un filtro FIR pasa alto, con un orden y frecuencia de corte especificado.
Puede ser usado un vector de ponderación (Window) para mejorar el comportamiento del filtro. Esta función crea un filtro de tipo I si Order es par e tipo IV si Order es impar : http://www.mathworks.com/help/signal/ug/fir-filter-design.html Para elegir el orden minimo del filtro puede elegirse el criterio :
where
Este criterio es similar a http://www.dspguide.com/ch16/2.htm
| [in] | Order | El orden del filtro pasa alto. |
| [in] | Wn | La frecuencia de corte normalizada del filtro pasa alto. Wn significa que la frecuencia de corte es Wn*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Window | Es un vector de ponderación para mejorar el comportamiento del filtro. Si este valor es igual a NULL entonces es usado una ventana de hamming como vector de ponderación. |
| PdsFir * pds_fir_get_new_bandpass | ( | PdsDfNatural | Order, |
| PdsDfReal | Wn1, | ||
| PdsDfReal | Wn2, | ||
| const PdsVector * | Window | ||
| ) |
Crea un filtro FIR pasa banda, con un orden y frecuencias de corte especificados.
Puede ser usado un vector de ponderación (Window) para mejorar el comportamiento del filtro. Esta función crea un filtro de tipo I si Order es par e tipo II si Order es impar : http://www.mathworks.com/help/signal/ug/fir-filter-design.html Para elegir el orden minimo del filtro puede elegirse el criterio :
![\[ Order \geq \frac{8}{BW} \]](form_21.png)
where
![\[ BW=|Wn1-Wn2-round(Wn1-Wn2)| \]](form_22.png)
Este criterio es similar a http://www.dspguide.com/ch16/2.htm
| [in] | Order | El orden del filtro pasa alto. |
| [in] | Wn1 | La frecuencia de corte normalizada del filtro pasa alto. Wn1 significa que la frecuencia de corte es Wn1*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Wn2 | La frecuencia de corte normalizada del filtro pasa bajo. Wn2 significa que la frecuencia de corte es Wn2*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Window | Es un vector de ponderación para mejorar el comportamiento del filtro. Si este valor es igual a NULL entonces es usado una ventana de hamming como vector de ponderación. |
| PdsFir * pds_fir_get_new_bandstop | ( | PdsDfNatural | Order, |
| PdsDfReal | Wn1, | ||
| PdsDfReal | Wn2, | ||
| const PdsVector * | Window | ||
| ) |
Crea un filtro FIR rechaza banda, con un orden y frecuencias de corte especificados.
Puede ser usado un vector de ponderación (Window) para mejorar el comportamiento del filtro. Esta función crea un filtro de tipo I si Order es par e tipo II si Order es impar : http://www.mathworks.com/help/signal/ug/fir-filter-design.html Para elegir el orden minimo del filtro puede elegirse el criterio :
where
Este criterio es similar a http://www.dspguide.com/ch16/2.htm
| [in] | Order | El orden del filtro pasa alto. |
| [in] | Wn1 | La frecuencia de corte normalizada del filtro bajo. Wn1 significa que la frecuencia de corte es Wn1*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Wn2 | La frecuencia de corte normalizada del filtro alto. Wn2 significa que la frecuencia de corte es Wn2*Fs/2, donde Fs es la frecuencia de muestreo. |
| [in] | Window | Es un vector de ponderación para mejorar el comportamiento del filtro. Si este valor es igual a NULL entonces es usado una ventana de hamming como vector de ponderación. |
Evalúa el filtro FIR con el valor de entrada x, el resultado es cargado en y.
En cada iteración se realizan corrimientos para el vector FIR->X.
| [in,out] | FIR | El filtro FIR a usar. |
| [in] | x | El valor de entrada del filtro. |
| [out] | y | El valor de salida del filtro. |
| int pds_fir_evaluate_vector | ( | PdsFir * | FIR, |
| const PdsVector * | x, | ||
| PdsVector * | y | ||
| ) |
Evalúa el filtro FIR con el vector de entrada x, el resultado es cargado en el vector y.
Se recomienda usar esta función solo cuando x es mucho mayo que FIR->h. Solo se realizan corrimientos de FIR->X al inicio y al final del vector x en los casos intermediarios se aprovecha tener el vector y no se efectuan corrimientos, por lo que es un poco mas rápido que pds_fir_evaluate_value cuando x es mucho mayo que FIR->h.
| [in,out] | FIR | El filtro FIR a usar. |
| [in] | x | El vector de entrada del filtro. |
| [out] | y | El vector de salida del filtro. |
| int pds_fir_get_x_value | ( | PdsFir * | FIR, |
| PdsDfNatural | i, | ||
| PdsDfReal * | x | ||
| ) |
Esta funcion retorna el valor de X[n-i].
Siendo n la muestra actual e i indica la i-esima muestra anterior.
| [in] | FIR | El filtro FIR a usar. |
| [in] | i | El valor i de la posicion de X[n-i] en la entrada del filtro. |
| [out] | x | El valor de X[n-i]. |
| int pds_fir_get_h_value | ( | PdsFir * | FIR, |
| PdsDfNatural | i, | ||
| PdsDfReal * | h | ||
| ) |
Esta funcion retorna el valor de h[i].
Siendo h[i] el factor de ponderacion de X[n-i].
| [in] | FIR | El filtro FIR a usar. |
| [in] | i | El valor i de la posicion de h[i]. |
| [out] | h | El valor de h[i]. |
| const PdsVector * pds_fir_get_h_vector | ( | PdsFir * | FIR | ) |
Esta funcion retorna la dirección del vector h con los valores del filtro fir.
| [in] | FIR | El filtro FIR a usar. |
| int pds_fir_get_order | ( | PdsFir * | FIR | ) |
Esta función retorna o grado del filtro FIR.
| [in] | FIR | El filtro FIR a usar. |
| int pds_fir_get_length | ( | PdsFir * | FIR | ) |
Esta función retorna la longitud del vector que representa el filtro FIR.
| [in] | FIR | El filtro FIR a usar. |
| int pds_fir_frequency_response | ( | const PdsFir * | FIR, |
| PdsVector * | H | ||
| ) |
Encuentra el módulo de la respuesta en frecuencia, normalizada de 0 a pi del filtro digital conformado por la respuesta al impulso h.
Teoría
![\[ H(w)=\left|h(Z=e^{j w})\right|, ~\forall ~ 0 \leq w \leq \pi \]](form_13.png)
| [in] | FIR | Filtro fir a anaizar. |
| [out] | H | Donde se guardará el módulo cuadrado de la respuesta en frecuencia del filtro digital. |
| void pds_fir_free | ( | PdsFir * | FIR | ) |
Libera el filtro de tipo PdsFir.
| [in] | FIR | El filtro a liberar. |







 1.8.11
1.8.11

