Ordinary Differential Equations¶
GSL Shell has moved
The project, its documentation and the release packages are now hosted on Github. Please find here the user manual.
Overview¶
This chapter describes functions for solving ordinary differential equation (ODE) initial value problems.
Note
The ODE integration routines in GSL Shell are based on GSL routines but they are completely rewritten in Lua. Only a few integration methods are actually available for the moment such as Runge-Kutta-Fehlberg and Price-Dormand methods.
The actual interface is also likely to be changed in the near future to handle ODE systems in array form.
In GSL Shell an ODE system is integrated by using an ODE solver object. The ODE solver store internally the state of the solver and you can advance the solution step-by-step until, eventually, the desired value of t is reached.
Creating a ODE system solver¶
An ODE solver allows users to obtain a numerical solution of an Ordinary Differential Equation (ODE) system. The ODE solver lets you solve the general n-dimensional first-order system,

for  .
The stepping functions rely on the vector of derivatives
.
The stepping functions rely on the vector of derivatives  and, for some methods, also on the Jacobian matrix,
and, for some methods, also on the Jacobian matrix,
For the moment all the methods implemented in GSL Shell does not use the Jacobian matrix.
Note
The current implementation is limited to systems with a few number of variables. Probably you should avoid to use it if you have more than 20 variables. An implementation for ODE systems in array form should be available in the near future.
ODE solver usage example¶
Here an examples about the usage of an ODE solver. The differential equation that we want integrate is:
and here the code that we can write to implement it:
-- define the ODE function
function odef(t, x, y)
return -y-x^2, 2*x - y^3
end
-- create the ODE solver
s = num.ode {N= 2, eps_abs= 1e-8}
-- we define initial values
t0, t1, h0 = 0, 30, 0.04
x0, y0 = 1, 1
-- we initialize the ODE solver
s:init(t0, h0, odef, x0, y0)
-- the ODE solver is iterated till the time t1 is reached
while s.t < t1 do
s:step(t1)
end
In alternative you may want to make a plot of the curve that you obtain. Here an example, we create a “path” to describe the curve that we want to plot and then we iterate with the ODE solver and we add all the points with the “line_to” method. The we create an empty plot and we add the line that we have just created:
-- we create a line and add the points obtained by integrating the ODE
ln = graph.path(x0, y0)
while s.t < t1 do
s:step(t1)
ln:line_to(s.y[1], s.y[2])
end
-- we create the plot by adding the line
p = graph.plot('ODE integration example')
p:addline(ln)
p:show()
And here the plot that you will obtain:
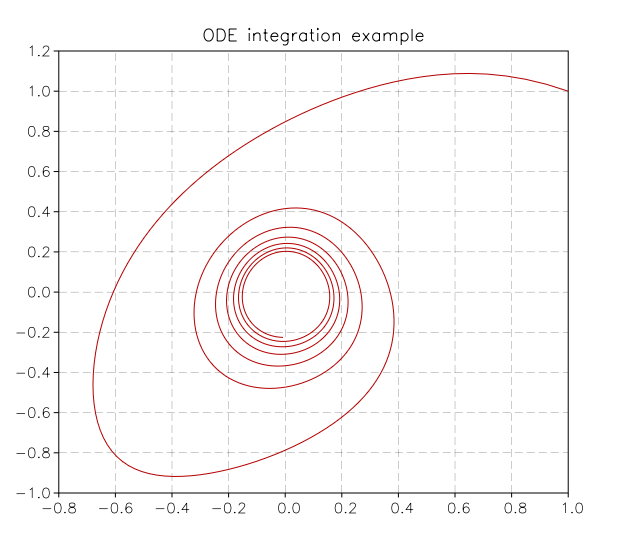
Curve obtained by integration of the above ODE system.
A Slightly Improved Example¶
In the example given above we have used the step() method to advance the ODE integrator. When you use ODE.step() the ODE integrator will adapt at each step the step size in order to respect the maximum absolute and relative error that you requested. This is a quite convenient behaviour but it can have a drawback since the sampling points can be very tightly packed or very largely spaced depending on the ODE system and the integration method. In some cases this is undesirable and you may want to obtain the values with a fixed sampling size. In this case you can use the evolve() method to obtain the values with a given sampling step.
So, in the example above you can change the while loop and use the evolve() method instead:
-- we create a line and add the points obtained by integrating the ODE
ln = graph.path(x0, y0)
for t, y1, y2 in s:evolve(t1, 0.1) do
ln:line_to(y1, y2)
end
to obtain values sampled with a spacing of 0.1 for the t values.
You can see that the evolve() method works actually as a Lua iterator.
You may also note that the evolve() iterator provides at each iteration the value t and each of the system variables in the standard order.
ODE Solver Class Definition¶
- class num.ODE¶
Solver of ODE system.
- ode(spec)¶
Create a new solver for an ODE system. The spec should be a table containing the following fields:
- N
- The dimension of the ODE system.
- eps_abs
- The maximum absolute error in the y that should be tolerated.
- eps_rel, optional
- The maximum relative error in the y that should be tolerated.
- method, optional
The low-level integration method used. Can be chosen between:
- rkf45, Embedded Runge-Kutta-Fehlberg (4, 5) method. This method is a good general-purpose integrator.
- rk8pd, Embedded Runge-Kutta Prince-Dormand (8,9) method.
- init(t0, h0, f, y0_1, y0_2, ..., y0_N)¶
Initialize the state of the solver to the time t0. The second argument h0 is the initial step size that the integrator will try. The function f is the function that defines the ODE system. It will be called like f(t, y_1, y_2, ..., y_N) where t is the time and y_1, y_2, ... are the values of the N independent values conventionally denoted here by ‘y’. The function f should return N values that correspond to values f_i(t, y_1, ..., y_N) for each component f_i of the ODE system function.
- step(t1)¶
Advance the solution of the system by a step chosen adaptively based on the previous step size. The new values (t, y) are stored internally by the solver and can be retrieved as properties with the name t and y where the latter is a column matrix of size N. The new values of t will be less than or equal to the value given t1. If the value s.t is less then t1 then the function evolve should be called again by the user.
- evolve(t1, t_step)¶
Returns a Lua iterator that advance the ODE system at each iteration of a step t_step until the value t1 is reached. The iterators returns the value t itself and all the system variables y0, y1, ... in the standard order.
Example:
-- we suppose an ODE system 's' is already defined and initialized local t1 = 50 for t, y1, y2 in s:evolve(t1, 0.5) do print(t, y1, y2) end